
Page 83 - Tạp chí Giao thông Vận Tải - Số Tết Dương Lịch
P. 83
KHOA HỌC CÔNG NGHỆ Tập 6 4
Tập 64
Số 12/2024 (748)
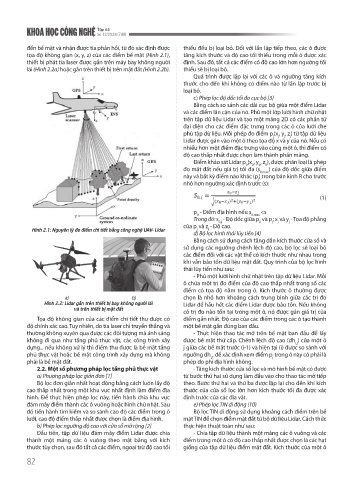
đến bề mặt và nhận được tia phản hồi, từ đó xác định được thiểu đều bị loại bỏ. Đối với lần lặp tiếp theo, các ô được
tọa độ không gian (x, y, z) của các điểm bề mặt (Hình 2.1), tăng kích thước và độ cao tối thiểu trong mỗi ô được xác
thiết bị phát tia laser được gắn trên máy bay không người định. Sau đó, tất cả các điểm có độ cao lớn hơn ngưỡng tối
lái (Hình 2.2a) hoặc gắn trên thiết bị trên mặt đất (Hình 2.2b). thiểu sẽ bị loại bỏ.
Quá trình được lặp lại với các ô và ngưỡng tăng kích
thước cho đến khi không có điểm nào từ lần lặp trước bị
loại bỏ.
c) Phép lọc độ dốc tối đa cục bộ [3]
Bằng cách so sánh các dải cục bộ giữa một điểm Lidar
và các điểm lân cận của nó. Phủ một lớp lưới hình chữ nhật
trên tập dữ liệu Lidar và tạo một mảng 2D có các phần tử
đại diện cho các điểm đặc trưng trong các ô của lưới che
phủ tập dữ liệu. Mỗi phép đo điểm p(x, y, z) từ tập dữ liệu
j
j
j
j
Lidar được gán vào một ô theo tọa độ x và y của nó. Nếu có
nhiều hơn một điểm đặc trưng vào cùng một ô, thì điểm có
độ cao thấp nhất được chọn làm thành phần mảng.
Điểm khảo sát Lidar p (x , y , z ), được phân loại là phép
0
0
0
0
đo mặt đất nếu giá trị tối đa (s 0,max ) của độ dốc giữa điểm
này và bất kỳ điểm nào khác (p) trong bán kính R cho trước
j
nhỏ hơn ngưỡng xác định trước (s):
(1)
p - Điểm địa hình nếu s 0,max <s
0
Trong đó: s - Độ dốc giữa p và p; x và y - Tọa độ phẳng
j
0
j
j
0,j
của p và z - Độ cao.
Hình 2.1: Nguyên lý đo điểm chi tiết bằng công nghệ UAV- Lidar j j
d) Bộ lọc hình thái lũy tiến [4]
Bằng cách sử dụng cách tăng dần kích thước cửa sổ và
sử dụng các ngưỡng chênh lệch độ cao, bộ lọc sẽ loại bỏ
các điểm đối với các vật thể có kích thước như nhau trong
khi vẫn bảo tồn dữ liệu mặt đất. Quy trình của bộ lọc hình
thái lũy tiến như sau:
- Phủ một lưới hình chữ nhật trên tập dữ liệu Lidar. Mỗi
ô chứa một trị đo điểm của độ cao thấp nhất trong số các
điểm có tọa độ nằm trong ô. Kích thước ô thường được
a) b) chọn là nhỏ hơn khoảng cách trung bình giữa các trị đo
Hình 2.2: Lidar gắn trên thiết bị bay không người lái Lidar để hầu hết các điểm Lidar được bảo tồn. Nếu không
và trên thiết bị mặt đất có trị đo nào tồn tại trong một ô, nó được gán giá trị của
Tọa độ không gian của các điểm chi tiết thu được có điểm gần nhất. Độ cao của các điểm trong các ô tạo thành
độ chính xác cao. Tuy nhiên, do tia laser chỉ truyền thẳng và một bề mặt gần đúng ban đầu.
thường không xuyên qua được các đối tượng mà ánh sáng - Thực hiện thao tác mở trên bề mặt ban đầu để lấy
không đi qua như tầng phủ thực vật, các công trình xây được bề mặt thứ cấp. Chênh lệch độ cao (dh ) của một ô
i,j
dựng... nếu không xử lý thì điểm thu được là bề mặt tầng j giữa các bề mặt trước (i-1) và hiện tại (i) được so sánh với
phủ thực vật hoặc bề mặt công trình xây dựng mà không ngưỡng dh để xác định xem điểm p trong ô này có phải là
j
i,T
phải là bề mặt đất. phép đo phi địa hình không.
2.2. Một số phương pháp lọc tầng phủ thực vật - Tăng kích thước cửa sổ lọc và mô hình bề mặt có được
a) Phương pháp lọc giản đơn [1] từ bước thứ hai sử dụng làm đầu vào cho thao tác mở tiếp
Bộ lọc đơn giản nhất hoạt động bằng cách luôn lấy độ theo. Bước thứ hai và thứ ba được lặp lại cho đến khi kích
cao thấp nhất trong một khu vực nhất định làm điểm địa thước của cửa sổ lọc lớn hơn kích thước tối đa được xác
hình. Để thực hiện phép lọc này, tiến hành chia khu vực định trước của các địa vật.
đám mây điểm thành các ô vuông hoặc hình chữ nhật. Sau e) Phép lọc TIN di động (10)
đó tiến hành tìm kiếm và so sánh cao độ các điểm trong ô Bộ lọc TIN di động sử dụng khoảng cách điểm trên bề
lưới, cao độ điểm thấp nhất được chọn là điểm địa hình. mặt TIN để chọn điểm mặt đất từ bộ dữ liệu Lidar. Cách thức
b) Phép lọc ngưỡng độ cao với cửa sổ mở rộng [2] thực hiện thuật toán như sau:
Đầu tiên, tập dữ liệu đám mây điểm Lidar được chia - Chia tập dữ liệu thành một mảng các ô vuông và các
thành một mảng các ô vuông theo mặt bằng với kích điểm trong một ô có độ cao thấp nhất được chọn là các hạt
thước tùy chọn, sau đó tất cả các điểm, ngoại trừ độ cao tối giống của tập dữ liệu điểm mặt đất. Kích thước của một ô
82