
Page 101 - Tạp chí Giao Thông Vận Tải - Số Tết Âm Lịch
P. 101
SỐ 1+2 KHOA HỌC CÔNG NGHỆ
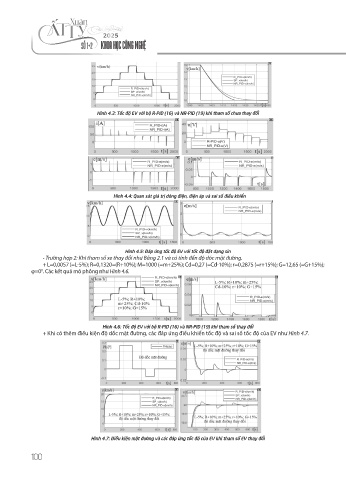
Hình 4.3: Tốc độ EV với bộ R-PID (16) và NR-PID (19) khi tham số chưa thay đổi
Hình 4.4: Quan sát giá trị dòng điện, điện áp và sai số điều khiển
Hình 4.5: Đáp ứng tốc độ EV với tốc độ đặt dạng sin
- Trường hợp 2: Khi tham số xe thay đổi như Bảng 2.1 và có tính đến độ dóc mặt đường.
+ L=0,0057 (=L-5%); R=0,1320=(R+10%); M=1000 (=m+25%); Cd=0,27 (=Cd-10%); r=0,2875 (=r+15%); G=12,65 (=G+15%);
φ=0 . Các kết quả mô phỏng như Hình 4.6.
0
Hình 4.6: Tốc độ EV với bộ R-PID (16) và NR-PID (19) khi tham số thay đổi
+ Khi có thêm điều kiện độ dốc mặt đường, các đáp ứng điều khiển tốc độ và sai số tốc độ của EV như Hình 4.7.
Hình 4.7: Điều kiện mặt đường và các đáp ứng tốc độ của EV khi tham số EV thay đổi
100