
Page 138 - Tạp chí Giao thông Vận Tải - Số Tết Dương Lịch
P. 138
Số 12/2024 (748) KHOA HỌC CÔNG NGHỆ
Tập 64
6
4
Tập
Ưu điểm của điều khiển sửa lỗi thụ động là đơn giản trong thiết kế, hạn chế số lượng phần mềm/phần cứng cần sử
dụng hay giảm được khối lượng cần tính toán, ít bị gián đoạn trong quá trình điều khiển khi có lỗi xảy ra.
Nhược điểm của điều khiển sửa lỗi thụ động là chỉ có thể giải quyết được hạn chế trong một số loại lỗi nhất định. Ngoài
ra, về khía cạnh chất lượng điều khiển, điều kiện hệ thống hoạt động bình thường và điều kiện hệ thống hoạt động khi có
lỗi xảy ra cần được tính toán trong quá trình thiết kế bộ điều khiển sửa lỗi thụ động. Do đó, bộ điều khiển sửa lỗi thụ động
có xu hướng tập trung cho tính bền vững của hệ thống trong tất cả các điều kiện hoạt động hơn là tối ưu hóa chất lượng
điều khiển trong từng điều kiện khác nhau như đảm bảo ổn định của hệ thống khi có lỗi xảy ra, giảm thời gian ổn định
trong điều kiện không có lỗi.
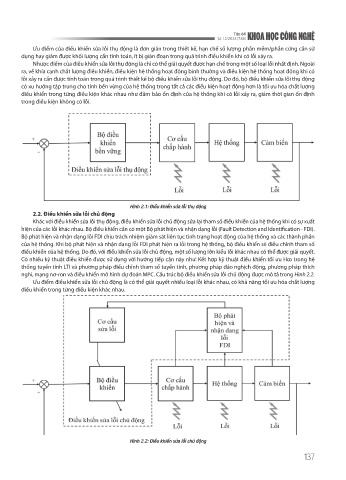
Hình 2.1: Điều khiển sửa lỗi thụ động
2.2. Điều khiển sửa lỗi chủ động
Khác với điều khiển sửa lỗi thụ động, điều khiển sửa lỗi chủ động sửa lại tham số điều khiển của hệ thống khi có sự xuất
hiện của các lỗi khác nhau. Bộ điều khiển cần có một Bộ phát hiện và nhận dạng lỗi (Fault Detection and Identification - FDI).
Bộ phát hiện và nhận dạng lỗi FDI chịu trách nhiệm giám sát liên tục tình trạng hoạt động của hệ thống và các thành phần
của hệ thống. Khi bộ phát hiện và nhận dạng lỗi FDI phát hiện ra lỗi trong hệ thống, bộ điều khiển sẽ điều chỉnh tham số
điều khiển của hệ thống. Do đó, với điều khiển sửa lỗi chủ động, một số lượng lớn kiểu lỗi khác nhau có thể được giải quyết.
Có nhiều kỹ thuật điều khiển được sử dụng với hướng tiếp cận này như: Kết hợp kỹ thuật điều khiển tối ưu Hꝏ trong hệ
thống tuyến tính LTI và phương pháp điều chỉnh tham số tuyến tính, phương pháp đảo nghịch động, phương pháp thích
nghi, mạng nơ-ron và điều khiển mô hình dự đoán MPC. Cấu trúc bộ điều khiển sửa lỗi chủ động được mô tả trong Hình 2.2.
Ưu điểm điều khiển sửa lỗi chủ động là có thể giải quyết nhiều loại lỗi khác nhau, có khả năng tối ưu hóa chất lượng
điều khiển trong từng điều kiện khác nhau.
Hình 2.2: Điều khiển sửa lỗi chủ động
137