
Page 94 - Tạp chí Giao Thông Vận Tải - Số Tết Âm Lịch
P. 94
SỐ 1+2 KHOA HỌC CÔNG NGHỆ
người, đồng thời có sự theo vết - tracking. Dữ liệu từ cảm Cảm biến hồng ngoại thụ động PIR là một cảm biến
biến PIR cũng sẽ được truyền về, giúp gia tăng tính chính điện tử đo bức xạ hồng ngoại phát ra từ các vật thể trong
xác của cảnh báo. trường nhìn, do vậy có khả năng phát hiện chuyển động
của người hoặc vật trong một phạm vi nhất định.
2.2. Phần mềm
Phần mềm được viết dùng ngôn ngữ Python. Chức
năng chính của phần mềm là phát hiện đối tượng người
và theo vết. Phần mềm sử dụng mô hình YOLOv8 và tệp dữ
liệu Coco dataset cho mục đích huấn luyện.
* Các thuật toán phát hiện đối tượng thông dụng:
Phát hiện đối tượng (Object Detection) là một công
nghệ máy tính liên quan đến thị giác máy tính (Computer
Vision) và xử lý hình ảnh (Image Processing) nhằm phát
Hình 2.1: Mô hình thiết bị cảnh báo dùng KIT Raspberry Pi hiện các trường hợp của đối tượng ngữ nghĩa của một lớp
2.1. Các thành phần phần cứng chính nhất định trong hình ảnh và video kỹ thuật số. Các thuật
- Kit mạch Raspberry Pi 4 Model B: toán phát hiện đối tượng thông dụng [9], gồm có:
Raspberry Pi 4 là một bo mạch tiên tiến, hỗ trợ nhiều - Phương pháp mô tả đặc trưng (Histogram of
tính năng mạnh mẽ. Kit này hỗ trợ SoC lõi tứ Cortex-A72 Oriented Gradients - HOG).
(ARM v8) 64-bit @ 1,5 GHz và bộ nhớ RAM 4GB. Kit có một - Mạng nơ-ron tích chập theo vùng (R-CNN).
cổng Gigabit Ethernet, wifi và bluetooth 5.0 tích hợp sẵn.
Đồng thời, Kit gồm 4 cổng USB, 40 chân GPIO, cổng xuất - Faster R-CNN: Mô hình Fast R-CNN và Faster R-CNN.
video HDMI và cổng xuất âm thanh. Raspberry Pi 4 hỗ trợ - Yolo: Là một mô hình mạng neural tích chập.
hệ điều hành Linux/Unix [8]. Mô hình YOLO lần đầu tiên được giới thiệu bởi Joseph
Redmon và cộng sự vào năm 2016 [10]. Yolo là một mô hình
mạng neural tích chập CNN được thiết kế để phát hiện các
đối tượng mà có ưu điểm nổi trội là nhanh hơn nhiều so với
những mô hình cũ, phù hợp cho hệ thống real-time và có
thể chạy tốt trên những máy tính nhúng như Raspberry Pi
4. Kể từ đó đến nay, đã có nhiều phiên bản của YOLO, một
trong những phiên bản gần đây nhất là YOLOv8.
Kiến trúc YOLOv8 có thể được chia thành ba thành
phần chính: Backbone (sử dụng CSPDarknet53 tùy chỉnh),
Neck (sử dụng mô-đun C2f thay cho mạng FPN truyền
thống) và Head (chịu trách nhiệm đưa ra các dự đoán) [11].
Hình 2.2: Bộ điều khiển trung tâm của hệ thống dựa trên KIT
Raspberry Pi 4.
- Camera Pi:
Camera Pi v2 (Hình 2.3) cung cấp độ phân giải 8
megapixel. Raspberry Pi 4 được trang bị khe cắm camera
chuyên dụng, qua giao diện nối tiếp camera (CSI). Camera
Pi v2 kết nối trực tiếp với bộ xử lý thông qua bus CSI cho
phép truyền dữ liệu hình ảnh.
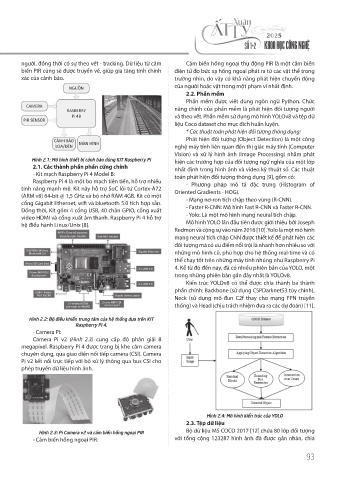
Hình 2.4: Mô hình kiến trúc của YOLO
2.3. Tệp dữ liệu
Hình 2.3: Pi Camera v2 và cảm biến hồng ngoại PIR Bộ dữ liệu MS COCO 2017 [12] chứa 80 lớp đối tượng
- Cảm biến hồng ngoại PIR: với tổng cộng 123287 hình ảnh đã được gán nhãn, chia
93